Mevcut uçakların bir haritasını tavanınıza yansıtın.
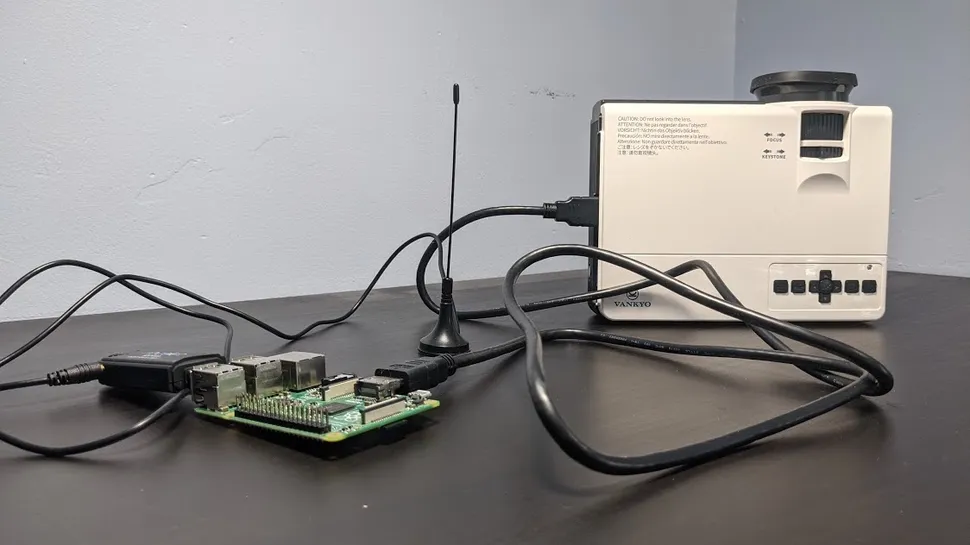
Şansınız şu anda evinizin üzerinde uçan uçaklar var. Bir ahududu Pi, ADS-B alıcısı olarak bilinen bir cihaz ve standart bir projektör kullanarak, bu uçakların gerçek zamanlı konumunu gösteren kendi “radarımızı” oluşturabiliriz ve eğer bir projektörümüz varsa, tavana yansıtabiliriz. Aksi takdirde, normal bir ekranda izleyebiliriz.
ADS-B teknolojisi hakkında
Birçok uçak, ADS-B olarak bilinen bir cihazla donatılmıştır. “otomatik bağımlı gözetim Yayını” anlamına gelen bu teknoloji, uçakların kendileri hakkında konumsal bilgileri diğer uçaklara, yer istasyonlarına ve hatta uydu istasyonlarına aktarmasını sağlar. Daha karmaşık çarpışma önleme teknolojilerinin kurulmasının mümkün olmadığı küçük uçaklar için, bir ads-B vericisi ve alıcısı uçuş güvenliğini artırmak için çok şey yapabilir.
ADS-B vericileri ile donatılmış uçaklar (giderek daha fazla ülkede yasa haline geliyor), yükseklik, GPS koordinatları ve yer hızı verileri gibi çeşitli konumsal verileri iletir. Neyse ki bizim için, tüm veriler standart bir frekansta iletilir ve şifrelenmez. Bu, küçük bir USB dongle ve bir Ahududu Pi ile yakındaki uçağın konum bilgilerini dinleyebileceğimiz anlamına gelir
Bu proje için neye ihtiyacınız olacak
- Ahududu Pi 4 veya ahududu Pi 3 ile güç adaptörü
- Ahududu Pi işletim sistemine sahip 8GB (veya daha büyük) microSD kart. Ahududu Pi için en iyi microSD kartlar Listemize bakın.
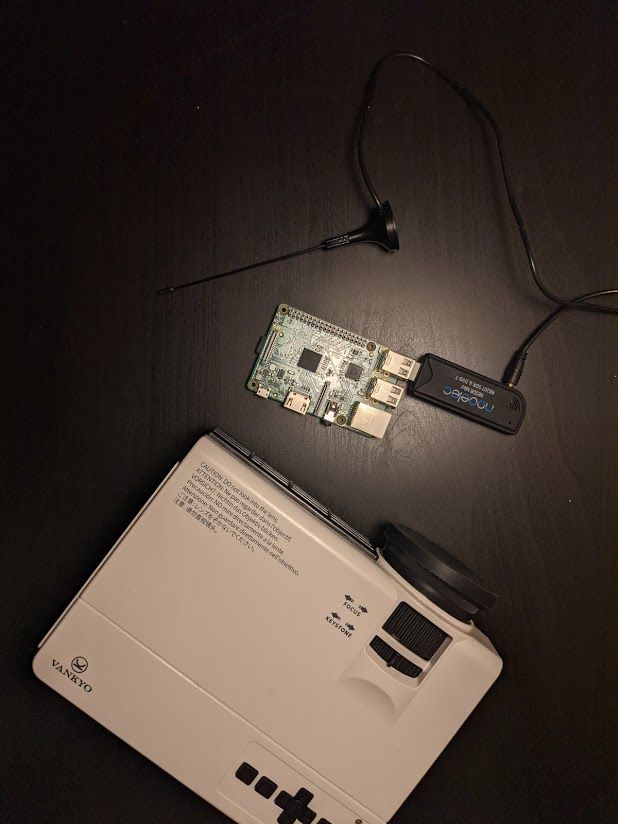
- ADS – B alıcı Kiti (anten ve USB dongle) bunun gibi.
- HDMI ve güç kabloları ile Monitör veya Projektör. Tavana yansıtmak istiyorsanız, bir projektöre ihtiyacınız olacak.
Ahududu Pi ile yerel uçaklar nasıl takip edilir
Başlamadan önce, ahududu Pi işletim sisteminizi kurduğunuzdan emin olun. Bunu daha önce yapmadıysanız, ilk kez bir Ahududu Pi’nin nasıl kurulacağı veya başsız bir Ahududu Pi’nin nasıl kurulacağı (klavye ve ekran olmadan) hakkındaki makalemize bakın.
1. Komut istemine aşağıdaki komutları girerek ahududu Pi OS’Yİ güncelleyin. Bu neredeyse söylemeye gerek yok, ama iyi bir uygulamadır.
1 > sudo apt-get update -y
2 > sudo apt-get upgrade -y2. ADS-B alıcısı ile iletişim kurmak ve Python kullanarak uçak konumlarını görüntülemek için ihtiyaç duyacağımız temel bileşenleri yükleyin.
sudo apt-get install build-essential debhelper librtlsdr-dev pkg-config dh-systemd libncurses5-dev libbladerf-dev libhackrf-dev liblimesuite-dev libsdl2-ttf-2.0-0sudo pip3 install virtualenv3. Dump1090 deposunu ev dizininize klonlayın. Dump1090, ads-B mesajlarını okunabilir JSON’A çözmemize izin verecek bir kod çözücüdür.
1 > cd ~/
2 > git clone https://github.com/flightaware/dump1090.git4. Dump1090 oluşturun . Bu, ahududu pi türünüze bağlı olarak biraz zaman alabilir.
1 > cd dump1090
2 > make5. ADS-B alıcınızı Ahududu Pi’nin USB portuna bağlayın.

6. Dump1090 dizininden çalıştırın.
1 > ./dump1090 --interactiveKonsolunuzda, yükseklik ve uçuş numarası da dahil olmak üzere havai uçaklar için verilerle dolu çeşitli satırlara sahip bir tablo görünmelidir.
Artık ADS-B kod çözücümüzü kurduğumuza göre, projeksiyon kodunu indirebiliriz. Python ve pygame kütüphanesini kullanarak, uçakların gerçek zamanlı konumunun yanı sıra uçuş numaralarını ve yüksekliklerini (hepsi dump1090’dan) ekranınızda gösteren basit bir program yazdım. Bunu değiştirmek veya kendi oluşturmak için daha açığız.
7. Ahududu Pi uçuş izci git klonlayın.
8. Flight tracker için python3 ile sanal bir ortam oluşturun.
1 > cd raspberry_pi_flight_tracker
2 > virtualenv -p python3 env49. Sanal ortamı etkinleştirinve python gereksinimlerini yükleyin.
1 > source env/bin/activate
2 > pip install -r src/requirements.txt10. Yeniden Adlandır environment.sample.sh için environment.sh ve düzenlemek için yeni dosyayı açın.
1 > mv environment.sample.sh environment.sh
2 > # edit the file with nano
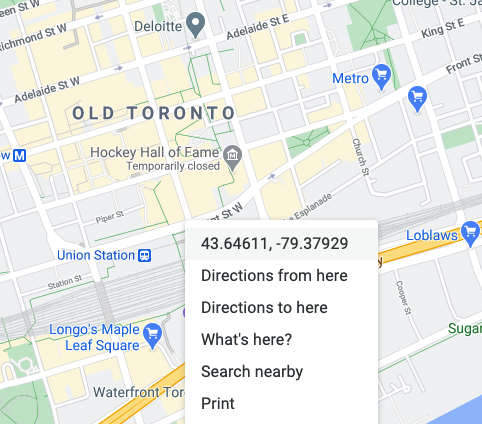
3 > nano environment.sh11. Geçerli enlem ve boylamınızın yanı sıra maksimum enlem ve boylam değerlerini ayarlamak için dosyayı düzenleyin. En yüksek değerler konumunuzun çevresinde nasıl gösterilecek belirleyecek. Enlem ve boylam değerlerinizi almanın kolay bir yolu Google Haritalar’ı kullanmaktır. İlk olarak, konumunuzu bulun ve menüyü görüntülemek için sağ tıklayın – panoya kopyalamak için enlem ve boylam değerlerini tıklayın.
Ardından, geçerli konumunuzdan uzaklaştırın. Geçerli konumunuzun kuzeyinde bir nokta seçin ve değeri panoya kopyalayın. Ardından, ilk değeri (latitude) bilgisayarınıza kopyalayın. environment.sh LAT_MAX olarak dosya (aşağıda 43.680222 olarak gösterilmiştir). Geçerli konumunuzun güneyinde bir nokta ile aynı şeyi yapın ve konumunuzdaki ilk değeri doldurun. environment.sh LAT_MİN olarak dosya. Bu değerler, izlemenin bulunduğunuz yerin Kuzey ve güneyine ne kadar uzandığını gösterir.
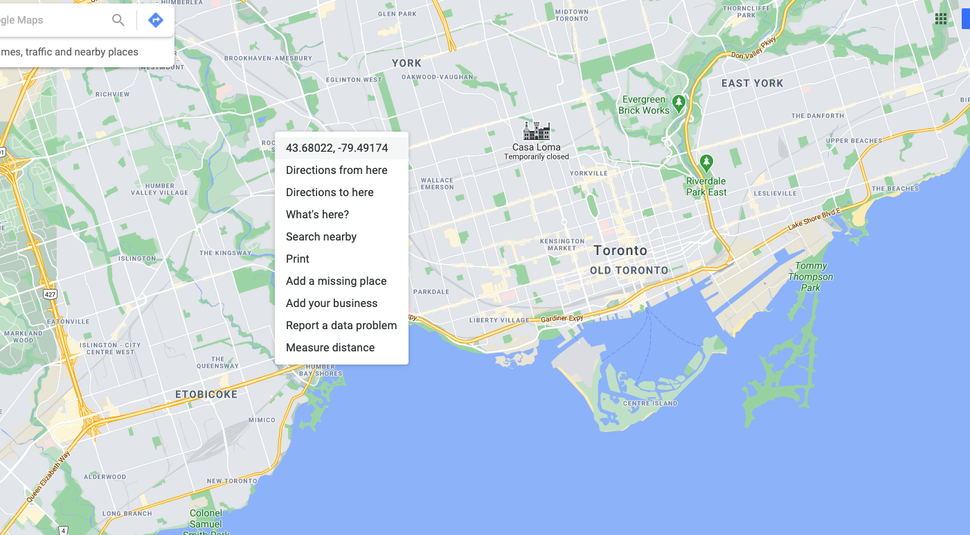
Ardından, geçerli konumunuzun batısında bir nokta seçin ve koordinatları panoya kopyalayın. Lon_max değerini doldurmak için ikinci değeri (yukarıda -79.49174 olarak görüntülenir) kullanın. Bulunduğunuz yerin doğusunda bir nokta ve LON_MİN ile aynı şeyi yapın. Bu değerler, izlemenin mevcut konumunuzdan doğudan batıya ne kadar uzandığını gösterir.
Tamamlandığında, sizin environment.sh dosya böyle bir şeye benzemelidir (koordinatlarınızla).
1 > export LAT_MAX=43.680222
2 > export LAT_MIN=43.63501
3 > export LON_MAX=-79.49174
4 > export LON_MIN=-79.37080
5 > export CURRENT_LAT=43.64611
6 > export CURRENT_LON=-79.3792912. Dump1090 sunucusunu ve projeksiyon kodunu aynı komutu kullanarak başlatın:
1 > bash entrypoint.sh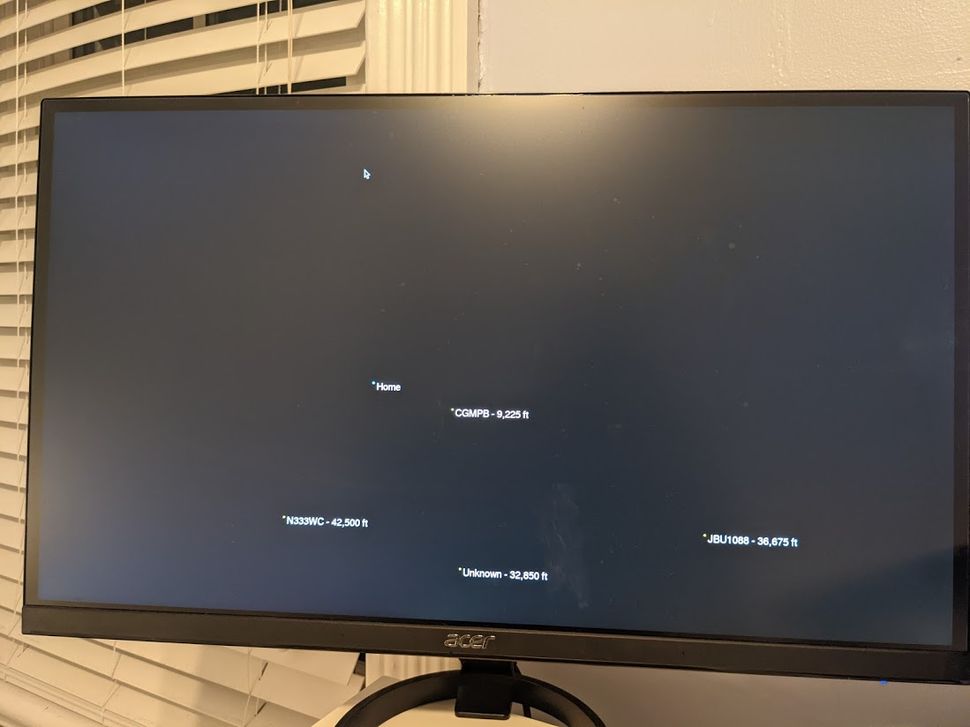
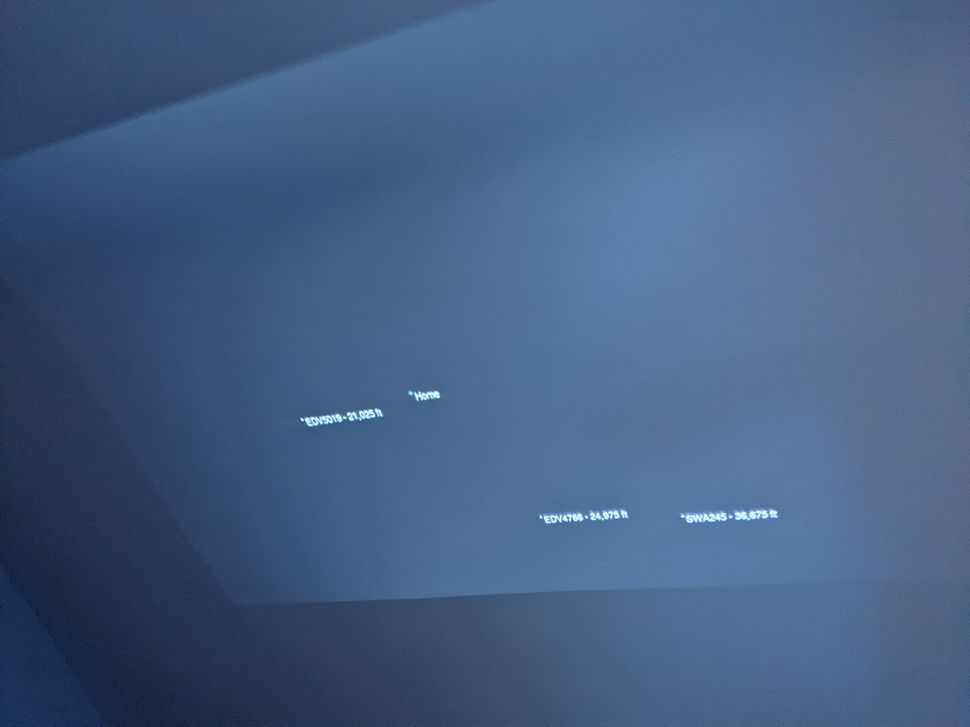
Her şey yolunda giderse, bir süre sonra, merkezde mevcut konumunuzu gösteren bir nokta bulunan boş bir ekranla karşılaşacaksınız ve çevrenizdeki uçaklar, sinyalleri göründüğünde ekran boyunca hareketli noktalar olarak görünecektir.
Sinyal almakta sorun yaşıyorsanız, anteninizi üst kattaki bir pencere gibi gökyüzünün net bir görüntüsüne sahip olduğu yere taşımayı deneyin.
13. Bir projektör kullanıyorsanız, tavana doğrultun ve ekranın üst kısmını manyetik kuzeyinizle hizalayın.
Ve o var. Kendi kişisel uçak “radar” sistemi.